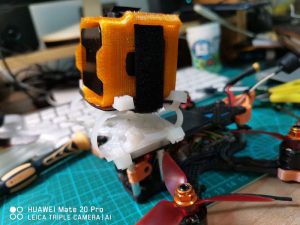
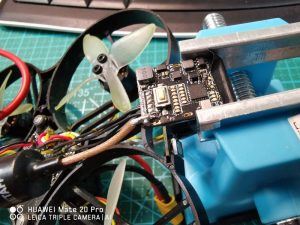
発売当初に問題になっていたESCが発火する問題が解決されたバージョンのBeta85Xを入手しました。
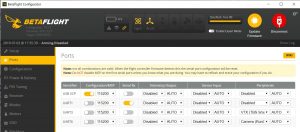
最近、Taranis Q X7SにCrossfire Micro TXみを搭載したのでCrossfire受信機搭載のものにしました。ただし85X HDでロングレンジを狙うつもりはありません。
最低限のBetaflightの設定で普通に飛びましたが色々と問題も発生。
[ VTXの電波が弱い ]
普通に飛ばしていて直ぐにわかるくらい電波が飛んでいません。Beta85XはVTXアンテナにLumenier AXIIが付いていることが特徴なのですが、この接続を疑いました。テスターをあてるとなんと心線とグラントがショートしています。アンテナを半田ごてで外してみるとVTX側もアンテナ側も問題は無さそうです。単純に半田付けをやり直して良くなりました。
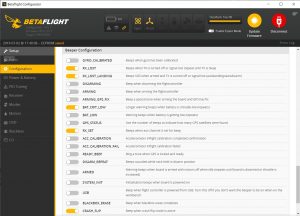
[ 電圧の異常 ]
十分に充電されたバッテリー使用しているのにLow Batteryになる。バッテリーを再接続すると直ったりする。バッテリーを接続した直後は電圧表示が低く、その後しばらくして電圧が上がっていくのがOSDで見えることもある。FCとESCボード間のコネクターの接触不良を疑い直接ジャンパーケーブルを半田付けしてみたが、その後にも発生。今のところ原因不明。新しいLiHvバッテリーだけで発生しているような気もするが、はっきりはしない。
[ プロップウオッシュ ]
プロップウオッシュがあるとは聞いていましたが、かなり酷い状況でした。スロットルを絞って、と言っても0では無い、高度を下げる時やパワーループの後半でスロットルを0近くに絞っている時に激しくYawがぶれます。
まだテストが足りませんがBetaflight 4.0.0導入後にかなり改善された気がします。
[ Fly away ]
炎天下(と言っても4月上旬なので気温は30度以下)でしばらく飛ばした後にアームして少し上昇させた後、どんどん上昇してしまう現象が発生しました。旋回しながら高度を落としディスアームして着陸。後ろ側二つのモーターがかなり熱くなっていた。その後、再度飛行させても同じだったので、その日の飛行はあきらめて帰宅。帰宅後の室内テストは問題なし。
これも原因不明。Betaflight 4.0.0にして様子を見ることにした。
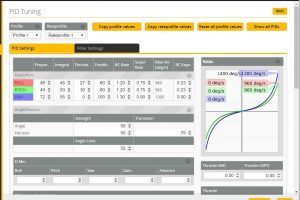
– Betaflight 更新 –
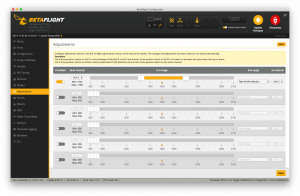
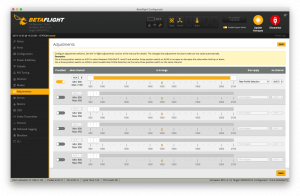
色々と問題もあるのでBetaflight 3.5.0から4.0.0に更新しました。PID値は3.5.0のメーカー設定のものを使用して、“4.0 Tuning Notes”の“I’ve already got a perfect tune on 3.5, I just want it to fly the same”の設定を行いしまた。ただし文章中に書いてあるI値を小さくするのを忘れたまま飛ばしていましたが、かなり調子よいです。この設定をベースに微調整していく予定です。
View this post on Instagram
Beta85X HD Betaflight 4.0 test. なんかプロップウォッシュが良くなかったかも。 #betafpv #beta85x










 #fpv #toothpick
#fpv #toothpick