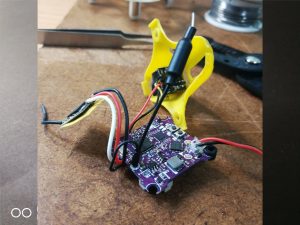
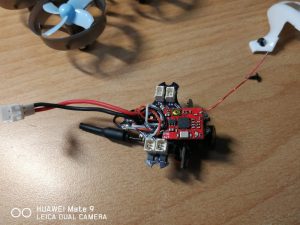
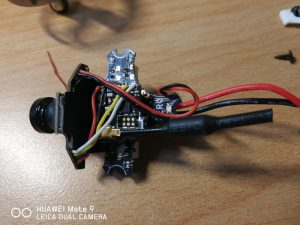
最近のレース用ドローンはFC(Flight Controller)にマイクロUSB端子が付いていてそれをパソコン、場合によっては携帯電話に接続して細かな設定を行います。現在、一番メジャーなFC用Firmwareであると思われるBetaflightを設定るするためのBetaflight Configuratorを使えるようにするまでに少々時間がかかったので、覚え書きです。
RTF(Ready to Fly)セットならば直ぐに飛ばせますが、それ以外の場合はBetaflightによる設定が必須だったりもします。
BetaflightはスタンドアローンなプログラムだけではなくChromeのもとで動くものもあります。使い勝手はどちらも同じです。USB接続したFCをシリアルポート(いわゆるCOMポート)として認識させるのが唯一の設定ですがWindowsでは少々分かりにくいところがあります。
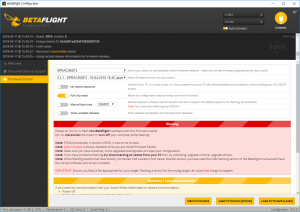
Betaflight Configuratorの画面上に必要なドライバーのリンクが貼ってあります。MacOSでも何かしらドライバーを入れた気がしますが、何も必要はないという話もあります。いずれにせよ悩むようなことはなくBetaflight Configuratorが使用できるようになりました。
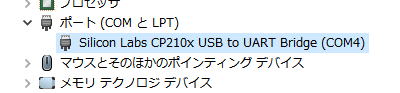
問題はWindows 10で構成しようとした時です。指定のドライバーをただ入れただけでは目的のCOMポートにはなりません。デバイスマネージャー(Windows 10だとWindowsアイコンを右クリックで見つかります)で見るとCP210xのUSBデバイスとしては認識されていますがCOMポートにはなっていません。ここからの手順ははっきりとは覚えていませんが最後はデバイスマネージャーでドライバーの手動更新を行って目的の構成になりました。その前にZadigによるドライバーの更新も行っているので、そちらも必須な気がします。またCOMポートに現れても違うドライバーだと動かないということもあります。最終的にはSilicon Labs CP201x USB UART Bridgeというドライバーで動いています。
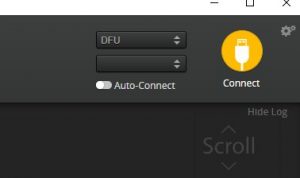
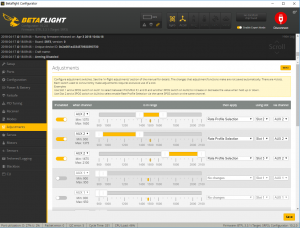
正しいポートが設定されるとBetaflight Configuratorは自動的にポートを見つけてくれるのでConnectボタンを押せば使えるようになります。
手順を再現するのが難しい(面倒?)なので、詳しくは書きませんが以下のYoutubeが正解を示していると思います。英語で長々と話していますが画面を見ていれば何をやりたいかは分かると思います。
Making Flight Controller Connect Through USB by Project Blue Falcon







 (注: このリンク先のブツは値段がおかしい)
(注: このリンク先のブツは値段がおかしい)